model = load_model('model.h5', compile = False) 로 컴파일 옵션을 줌
< create_dataset.py >
- 1분 30초동안 녹화될 때의 데이터를 모은다
import cv2
import mediapipe as mp
import numpy as np
import time, os
#actions = ['come', 'away', 'spin']
actions = ['one', 'two', 'three','four','five']
seq_length = 30
secs_for_action = 30
# MediaPipe hands model
mp_hands = mp.solutions.hands
mp_drawing = mp.solutions.drawing_utils
hands = mp_hands.Hands(
max_num_hands=1,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
cap = cv2.VideoCapture(0)
created_time = int(time.time())
os.makedirs('dataset', exist_ok=True)
while cap.isOpened():
for idx, action in enumerate(actions):
data = []
ret, img = cap.read()
img = cv2.flip(img, 1)
cv2.putText(img, f'Waiting for collecting {action.upper()} action...', org=(10, 30), fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=1, color=(255, 255, 255), thickness=2)
cv2.imshow('img', img)
cv2.waitKey(3000)
start_time = time.time()
while time.time() - start_time < secs_for_action:
ret, img = cap.read()
img = cv2.flip(img, 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
result = hands.process(img)
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if result.multi_hand_landmarks is not None:
for res in result.multi_hand_landmarks:
joint = np.zeros((21, 4))
for j, lm in enumerate(res.landmark):
joint[j] = [lm.x, lm.y, lm.z, lm.visibility]
# Compute angles between joints
v1 = joint[[0,1,2,3,0,5,6,7,0,9,10,11,0,13,14,15,0,17,18,19], :3] # Parent joint
v2 = joint[[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20], :3] # Child joint
v = v2 - v1 # [20, 3]
# Normalize v
v = v / np.linalg.norm(v, axis=1)[:, np.newaxis]
# Get angle using arcos of dot product
angle = np.arccos(np.einsum('nt,nt->n',
v[[0,1,2,4,5,6,8,9,10,12,13,14,16,17,18],:],
v[[1,2,3,5,6,7,9,10,11,13,14,15,17,18,19],:])) # [15,]
angle = np.degrees(angle) # Convert radian to degree
angle_label = np.array([angle], dtype=np.float32)
angle_label = np.append(angle_label, idx)
d = np.concatenate([joint.flatten(), angle_label])
data.append(d)
mp_drawing.draw_landmarks(img, res, mp_hands.HAND_CONNECTIONS)
cv2.imshow('img', img)
if cv2.waitKey(1) == ord('q'):
break
data = np.array(data)
print(action, data.shape)
np.save(os.path.join('dataset', f'raw_{action}_{created_time}'), data)
# Create sequence data
full_seq_data = []
for seq in range(len(data) - seq_length):
full_seq_data.append(data[seq:seq + seq_length])
full_seq_data = np.array(full_seq_data)
print(action, full_seq_data.shape)
np.save(os.path.join('dataset', f'seq_{action}_{created_time}'), full_seq_data)
break
< train.py >
import numpy as np
import os
from tensorflow.keras.utils import to_categorical
from sklearn.model_selection import train_test_split
from tensorflow.keras.utils import to_categorical
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import LSTM, Dense
from tensorflow.keras.callbacks import ModelCheckpoint, ReduceLROnPlateau
import matplotlib.pyplot as plt
from sklearn.metrics import multilabel_confusion_matrix
from tensorflow.keras.models import load_model
os.environ['CUDA_VISIBLE_DEVICES'] = '1'
os.environ['TF_FORCE_GPU_ALLOW_GROWTH'] = 'true'
actions = [
'one',
'two',
'three',
'four',
'five'
]
data = np.concatenate([
np.load('dataset/seq_one_1659147525.npy'),
np.load('dataset/seq_two_1659147525.npy'),
np.load('dataset/seq_three_1659147525.npy'),
np.load('dataset/seq_four_1659147525.npy'),
np.load('dataset/seq_five_1659147525.npy')
], axis=0)
print(data.shape)
x_data = data[:, :, :-1]
labels = data[:, 0, -1]
print(x_data.shape)
print(labels.shape)
y_data = to_categorical(labels, num_classes=len(actions))
y_data.shape
x_data = x_data.astype(np.float32)
y_data = y_data.astype(np.float32)
x_train, x_val, y_train, y_val = train_test_split(x_data, y_data, test_size=0.1, random_state=2021)
print(x_train.shape, y_train.shape)
print(x_val.shape, y_val.shape)
y_data = to_categorical(labels, num_classes=len(actions))
print(y_data.shape)
model = Sequential([
LSTM(64, activation='relu', input_shape=x_train.shape[1:3]),
Dense(32, activation='relu'),
Dense(len(actions), activation='softmax')
])
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['acc'])
model.summary()
history = model.fit(
x_train,
y_train,
validation_data=(x_val, y_val),
epochs=200,
callbacks=[
ModelCheckpoint('models/model.h5', monitor='val_acc', verbose=1, save_best_only=True, mode='auto'),
ReduceLROnPlateau(monitor='val_acc', factor=0.5, patience=50, verbose=1, mode='auto')
]
)
fig, loss_ax = plt.subplots(figsize=(16, 10))
acc_ax = loss_ax.twinx()
loss_ax.plot(history.history['loss'], 'y', label='train loss')
loss_ax.plot(history.history['val_loss'], 'r', label='val loss')
loss_ax.set_xlabel('epoch')
loss_ax.set_ylabel('loss')
loss_ax.legend(loc='upper left')
acc_ax.plot(history.history['acc'], 'b', label='train acc')
acc_ax.plot(history.history['val_acc'], 'g', label='val acc')
acc_ax.set_ylabel('accuracy')
acc_ax.legend(loc='upper left')
plt.show()
model = load_model('models/model.h5')
y_pred = model.predict(x_val)
multilabel_confusion_matrix(np.argmax(y_val, axis=1), np.argmax(y_pred, axis=1))
< test.py >
# https://storage.googleapis.com/tensorflow/windows/gpu/tensorflow_gpu-2.6.0-cp37-cp37m-win_amd64.whl
import cv2
import mediapipe as mp
import numpy as np
from tensorflow.keras.models import load_model
from tensorflow.keras.utils import to_categorical
#actions = ['come', 'away', 'spin']
actions = ['one', 'two', 'three','four','five']
seq_length = 30
#model = load_model('models/model2_1.0.h5') # -> come, away, spin
model = load_model('models/model.h5') # -> come, away, spin
# MediaPipe hands model
mp_hands = mp.solutions.hands
mp_drawing = mp.solutions.drawing_utils
hands = mp_hands.Hands(
max_num_hands=1,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
cap = cv2.VideoCapture(0)
# w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
# h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
# fourcc = cv2.VideoWriter_fourcc('m', 'p', '4', 'v')
# out = cv2.VideoWriter('input.mp4', fourcc, cap.get(cv2.CAP_PROP_FPS), (w, h))
# out2 = cv2.VideoWriter('output.mp4', fourcc, cap.get(cv2.CAP_PROP_FPS), (w, h))
seq = []
action_seq = []
while cap.isOpened():
ret, img = cap.read()
img0 = img.copy()
img = cv2.flip(img, 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
result = hands.process(img)
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if result.multi_hand_landmarks is not None:
for res in result.multi_hand_landmarks:
joint = np.zeros((21, 4))
for j, lm in enumerate(res.landmark):
joint[j] = [lm.x, lm.y, lm.z, lm.visibility]
# Compute angles between joints
v1 = joint[[0,1,2,3,0,5,6,7,0,9,10,11,0,13,14,15,0,17,18,19], :3] # Parent joint
v2 = joint[[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20], :3] # Child joint
v = v2 - v1 # [20, 3]
# Normalize v
v = v / np.linalg.norm(v, axis=1)[:, np.newaxis]
# Get angle using arcos of dot product
angle = np.arccos(np.einsum('nt,nt->n',
v[[0,1,2,4,5,6,8,9,10,12,13,14,16,17,18],:],
v[[1,2,3,5,6,7,9,10,11,13,14,15,17,18,19],:])) # [15,]
angle = np.degrees(angle) # Convert radian to degree
d = np.concatenate([joint.flatten(), angle])
seq.append(d)
mp_drawing.draw_landmarks(img, res, mp_hands.HAND_CONNECTIONS)
if len(seq) < seq_length:
continue
input_data = np.expand_dims(np.array(seq[-seq_length:], dtype=np.float32), axis=0)
y_pred = model.predict(input_data).squeeze()
i_pred = int(np.argmax(y_pred))
conf = y_pred[i_pred]
if conf < 0.9:
continue
action = actions[i_pred]
action_seq.append(action)
if len(action_seq) < 3:
continue
this_action = '?'
if action_seq[-1] == action_seq[-2] == action_seq[-3]:
this_action = action
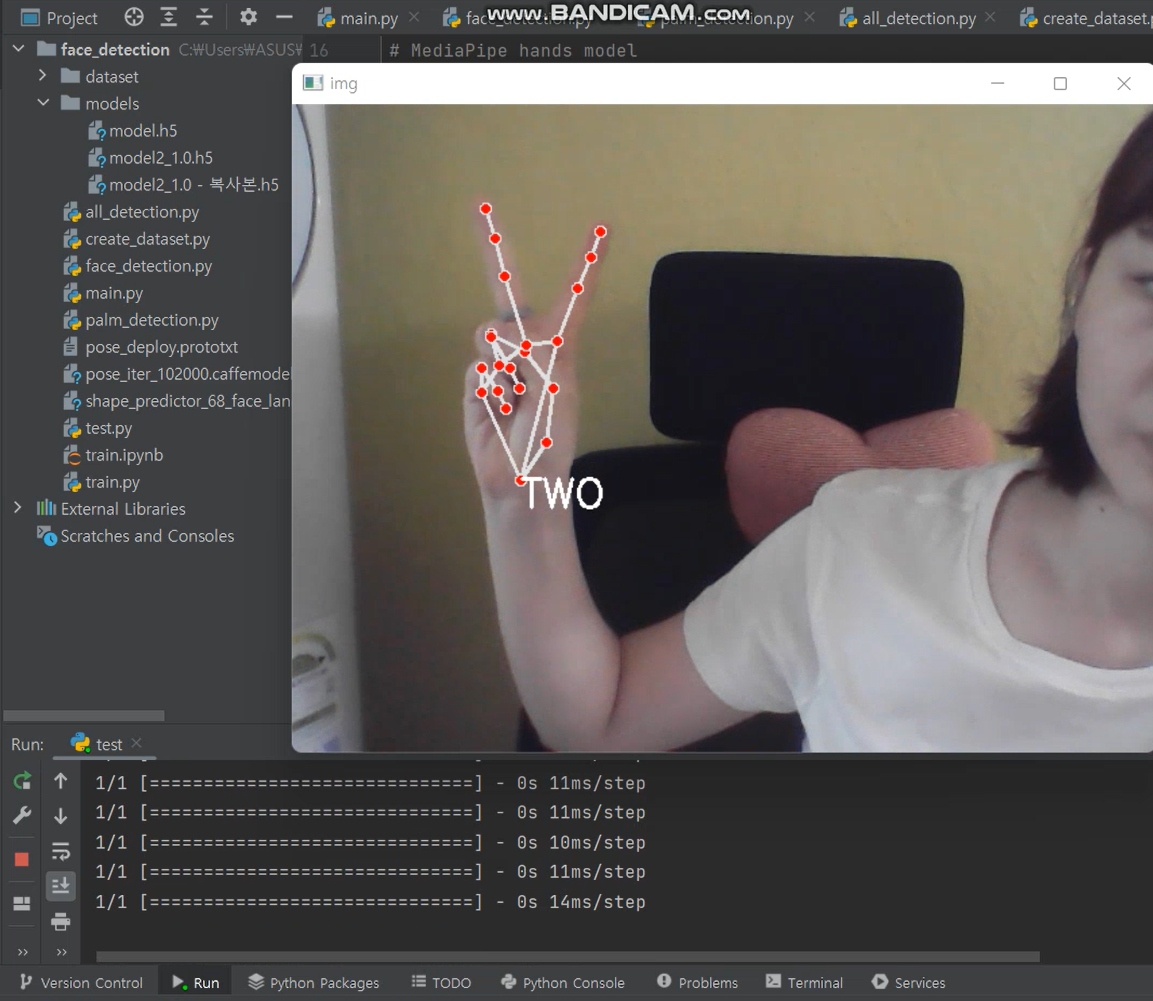
cv2.putText(img, f'{this_action.upper()}', org=(int(res.landmark[0].x * img.shape[1]), int(res.landmark[0].y * img.shape[0] + 20)), fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=1, color=(255, 255, 255), thickness=2)
# out.write(img0)
# out2.write(img)
cv2.imshow('img', img)
if cv2.waitKey(1) == ord('q'):
break
< 결과화면>

'F💻W > Coding' 카테고리의 다른 글
| Atmega로 UART, SPI 통신 구현 (0) | 2023.12.04 |
|---|---|
| ATMEGA UART 출력 (0) | 2023.11.21 |
| gpio mode 참고 (0) | 2023.07.10 |
| Silicon Lab EFR32 코드 분석 (0) | 2023.06.26 |
| [STM32F030C6T6] Bootloader 구현 (0) | 2023.03.30 |
| JSON Encoding/Decoding in C (0) | 2022.10.18 |