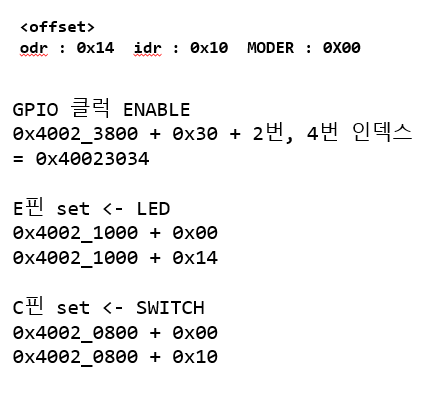
Register 역할 RCC_AHB1ENR GPIO 사용을 위한 클록 설정 사용 원하는 핀 번호 1로 설정 GPIOx_MODER 입출력을 설정해주는 레지스터 00 : INPUT 01 : GPO MODE 정해진 MODE를 토대로 핀 번호당 2비트씩 설정해준다 GPIOx_IDR 전기적 상태 확인이 가능 GPIOx_ODR 핀번호마다 전기적 신호 변경이 가능 #include //#include "stm32f4xx.h" #define rRCC_AHB1ENR (*(int *)0x40023830) // -> GPIO CLK ON #define rGPIOE_MODER (*(int *)0x40021000) // -> LED와 연결된 핀 #define rGPIOE_ODR (*(int *)0x40021014) #define..